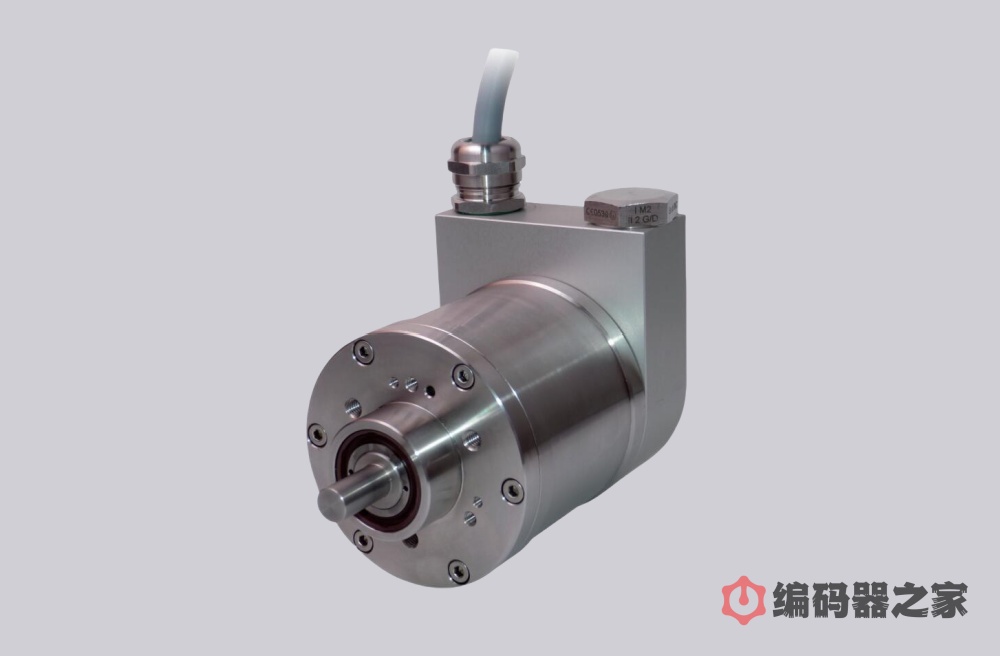
Мы предлагаем решения по замене энкодеров в виде нестандартных замен со всеми параметрами применения 1:1, идеальных замен для прототипов энкодеров, решения проблем с закупками и других проблем. На рисунке показано решение по замене.
Технические данные многооборотного абсолютного поворотного энкодера CVM78E
Общие характеристики
причинность
Подробная информация
Тип обнаружения
оптический отбор проб
Тип оборудования
Многооборотные абсолютные датчики поворота
Функциональная безопасность (MTTFd)
25 a, L10: 7,7 E+9 (при 3000 об/мин)
Рабочее напряжение (U_B)
10 ... 30 В ПОСТОЯННОГО ТОКА
Ток питания в режиме холостого хода (I_0)
350 мА макс.
Время задержки до готовности (t_v)
< 250 мс
биометрия
16 бит ± 2 LSB, 13 бит ± 1 LSB, 12 бит ± 0,5 LSB
код вывода
двоичный код
Тип интерфейса
CANopen
решение (конгресса)
До 16 бит для однооборотных, до 14 бит для многооборотных, до 30 бит в целом
прибл. 2600 г (комбинация 1), прибл. 3900 г (комбинация 2)
скорость вращения
Максимум 3000 мин^-1
момент инерции (механика)
180 г см^2
Пусковой момент
≤ 4 Нсм
нагрузка на вал
Осевой: 60 Н, радиальный 80 Н
возможность подключения
причинность
Подробная информация
кабельное соединение
∅ 10,2 мм, Radox 9 x 0,5 мм²
клеммный отсек
Опционально, см. информацию для заказа
режим работы
режим работы
инструкции
режим опроса
Подключенный хост запрашивает текущее значение местоположения с помощью сообщения запроса телепортации.
периодический режим
Энкодер циклически отправляет текущее значение положения без запроса от хоста.
Синхронизированный режим
Энкодер отправляет текущее значение положения после получения сообщения синхронизации от хоста.
эта статья была написана Дом Кодера Опубликовано в. Дом КодераПожалуйста, сохраняйте целостность статьи и указывайте источник статьи (Encoder House) и ссылку на эту страницу. 原文链接:https://www.bmq123.com/ru/1090.html